
FW01智能制造生产线机器人实训教学设备平台
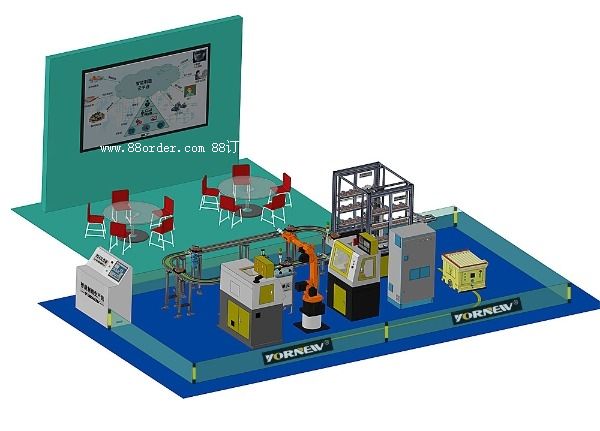
fw01智能制造生产线机器人实训教学设备平台是一款用于培养工业机器人数控机床上下料高技能人才的设备,是工业4.0智能工厂柔性加工中的fms单元,可作为大专院校学生自动化专业、机电一体化专业、机器人专业、企业工程师进行机器人培训,提高阶段综合性学习与训练。
产品概述:
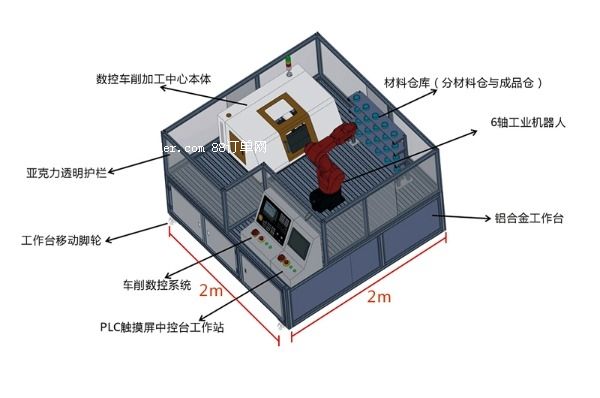
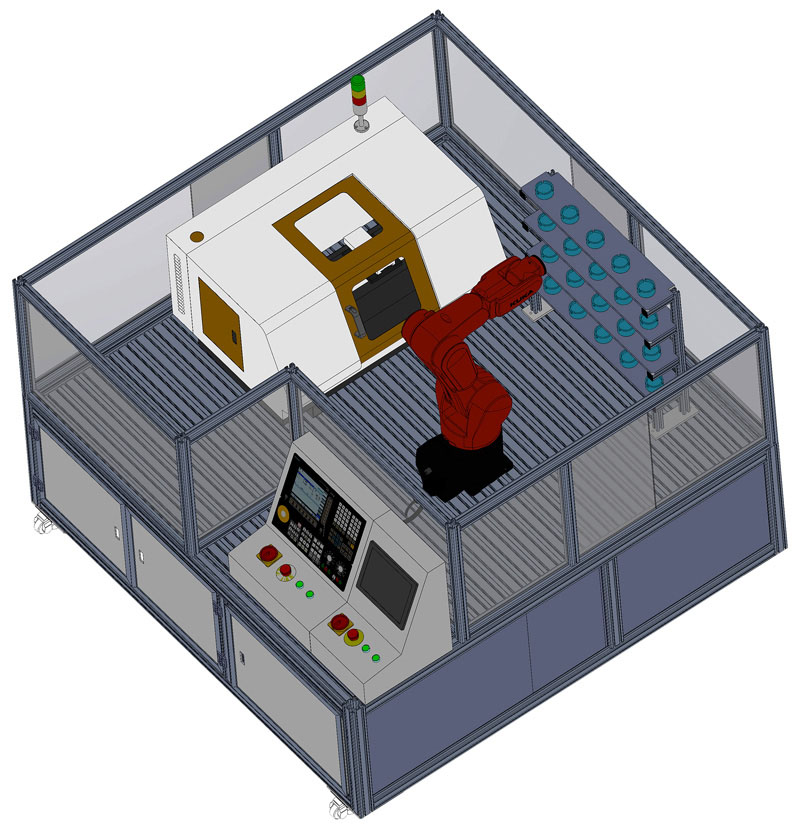
fw01智能制造生产线机器人实训教学设备平台以小型的柔性制造系统为载体,主要特点是占地空间小,是由一台工业6轴自由度机器人、一台柔性数控车床、plc触摸屏编程模、材料仓库组成,实现自动化上下料无人工作站,机器人按指令给数控车床送料、取料;该系统能够实现工业机器人上下料工作站系统的编程、上下料系统的集成、plc系统编程、通讯实训、机器人编程、数控编程、数控加工等环节。让学生轻松掌握工业6轴机器人与数控机床组建fms上下料工作站加工系统,能满足学生对工业机器人学习及操作的需要,实现和工厂实际情况无缝对接,涉及的知识点丰富、综合,系统性强,学生通过该套系统的学习与训练,对智能无人工的组建整体性应用有全面的了解与体验。
显著特点
(1)综合性强:集机器人操作与编程、数控加工、plc应用、通讯于一体,将执行机构、控制系统、驱动系统及各专业学科有机结合;
(2)设备安全便于操作:以小型数控机床为柔性制造系统为载体,主要特点是占地空间小、使用安全、利于学生动手参于操作等优点,同时系统采取了多重安全防护措施,保证了学习者的安全;
(3)模块化:采用分层和模块化结构设计,分别对不同的功能需要设计不同程序,在这些功能模块的相互协调下实现不同的功能,这些功能既可以单独运行,也可以与其他模块组成系统。
(4)扩展性强:除了完成机器人上下料系统的功能,本实训系统还可以通过改变被控机器人执行末端,变成其他功能的机器人工作站,提高了设备的使用率。
(5)设备支持mes系统功能,cnc和驱动之间采用profibus profibus高速总线通讯协议。
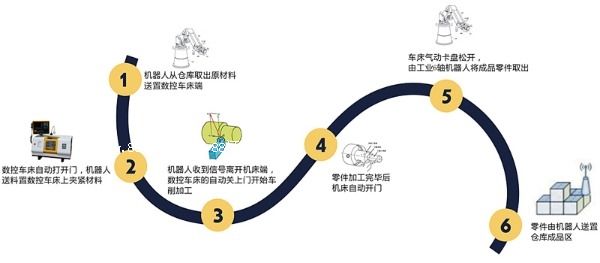
产品工作流程:
工业机器人从仓库取出原材料,由6自由度工业机器人送置数控车床端,数控车床自动打开门,机器人送料置数控车床上夹紧材料,机器人收到信号离开机床端,数控车床的自动关上门开始车削加工,零件加工完毕后,机床自动开门,零件由机器人送置仓库成品区。学生在熟练掌握该系统的操作与编程以后,也可以对零件类型和加工工艺进行调整。
基本实训项目
1、工业机器人实训
2、数控技术实训
3、机器人与机床通讯技术
4、机械结构训练技术
5、气动控制技能培训
6、故障检测技术技能培训
7、传感器技术及应用
8、plc编程技术
整套设备主要配置清单序号名称数量型号1工业6轴高速机器人本体1台yornew f0062数控车削加工中心本体1台ck210-fm3材料仓库1个cs014西门子plc控制器1个6es7 214-1hg31-0xb05西门子plc扩展io模块1个6es7 223-1pl30-0xb06触摸屏中控台1个mt8102ip7欧姆龙继电器模组2个bmz-r18电子手脉2个hli69车削工业级数控系统1套980tb10xz电机2套yornew 3205-1af61-0lg111驱动器2套yornew 3sl3210-650-5ua0126轴机器人控制系统1套gr-c13三爪气动卡盘1套smc14机器人气动夹具1套sh0115机床智能自动门推拉系统1套kifl316屏蔽电缆3条yn38170.6帕空压机1台yn3918铝合金工作台1套yn5219plc工作站单元1套yn201
五、主要设备技术参数序号名称数量单位设备简介及功能1yornew f006六自由度工业机器人本体1套1)动作类型:多关节型;控制轴数6轴;
2)最大活动半径:562mm;
3)手部最大负载(第6轴):3 kg
4)机器人重量:36kg;
5)机器人 底座尺寸:340 x 340mm
6)驱动方式:交流伺服驱动;
7)重复定位精度:±0.02mm;
8)轴运动:轴动作范围
j1回转轴≥+150°~ -150°
j2立臂轴≥+ 136°~ - 51°
j3横臂轴≥+ 64°~ - 131°
j4腕轴≥+ 150°~ - 150°
j5腕摆轴≥+ 120°~ - 120°
j6腕转轴≥+ 360°~- 360°
9)轴运动速度:
j1回转轴≥375°/s
j2立臂轴≥375°/s
j3横臂轴≥419°/s
j4腕轴≥600°/s
j5腕摆轴≥600°/s
j6腕转轴≥750°/s
10)最大扭矩:
j4腕轴≥9.3nm
j5腕摆轴≥9.3nm
j6腕转轴≥4.5nm
11)控制轴数量:6
12)手动操作速度≥4段可调
13)机器人本机、控制系统、驱动器、伺服电机要求为同一国产知名品牌;
14) j1,j2,j3减速器采用:进口rv减速器
15)cpu card dram模块:32mb;
16)from模块:32 mb;
17)sram模块:2mb;2ck210-fm数控车削加工中心本体1套(a) 设备特点
1、使用220伏电压、采用透明有机玻璃与金属钣金全封闭结构,提高使用的安全性和观摩性,采用精选的优质铸铁材料铸造,床身导轨经超音频淬火后精磨,硬度高、钢性好,保证机器的钢性,采用高精度研磨滚珠丝杆,保证机器加工精度,xz各轴配置有集中式润滑油路系统,保证丝杆及导轨使用寿命和加工精度;可自动车削各种回转表面,如圆柱面、圆锥面、特形面等,并能进行车螺纹、镗、铰加工,效率高、适用性强;
2、配有工件冷却系统,可加工钢件;配置4工位电动刀架,可加工复杂的零件工艺;
3、配有电子手轮(手脉)、手动操作及对刀操作更方便灵活,配有led工作灯;
4、主要加工材料有:钢、铁、铜、铝、pvc塑料等材料;
(b) 设备参数
重复定位精度:0.02mm
最大回转直径:210mm
最大夹持直径:80mm
x轴行程:80mm
z轴行程:290mm
主轴转速(无级):300~1750rpm±10%
电动刀架工位数:4工位
刀架角度:360 °
刀具回转精度:0.005mm
主轴通孔:20mm
气动卡盘:直径110mm
冷却系统:有
车螺纹功能:有
主轴孔莫氏锥度:莫氏3号
尾轴孔莫氏锥度:莫氏2号
主轴电机功率:1.1kw
电子手轮:配有电子手轮
丝杆:c5级滚珠丝杆
机床自动门,开关门速度90mm/秒
使用电源:ac220v/50hz
净重:180kg
外型尺寸:1000×700×580mm3yn201 plc工作站1套设备特点
铝合金型材构成,连接牢固,玻璃门一目了然,使用知名品牌工业级plc,可随意扩展。
设备参数
cpu 特征
用户存储器:75 kb 工作存储器/4 mb 负载存储器,可用 sd 卡扩展/10 kb 保持性存储器
板载数字 i/o:14 点输入/10 点输出
板载模拟 i/o:2 路输入
信号模块扩展:最多 8 个信号模块
信号板扩展:最多 1 块信号板
通信模块扩展:最多 3 个通信模块
高速计数器:单相:3 个 100 khz 以及 3 个 30 khz 的时钟频率;正交相位:3 个 80 khz 以及 3 个 20 khz 的时钟频率
脉冲输出:4
脉冲捕捉输入:14
性能
布尔运算执行速度:0.08μs/指令
移动字执行速度:1.7μs/指令
实数数学运算执行速度:2.3μs/指令
通信
端口数:1
类型:以太网
连接数:
• 3 个用于 hmi
• 1 个用于编程设备
• 8 个用于用户程序中的以太网指令
• 3 个用于 cpu 对 cpu
电源
电压范围:20.4 - 28.8 v dc
保持时间(掉电):24 v dc 时 10 ms
最大波纹噪声(<10 mhz)
数字输入:
输入点:14
模拟输入:2
数字输出:104cs01仓库1套立体仓库外围尺寸:750×730×153mm
仓位:4层5列20格,每个仓位带传感器5980tb车削工业级数控系统1套通信功能:
1、带网口支持mes系统通过modbus通讯协议读取系统坐标、运行状态、运行速度、钻速、数控程序等信息;支持远程文件调用加工、u盘等多种通讯方式;
2、零件程序、参数等文件双向传输,支持plc 程序、系统软件升级
3、 usb:u 盘文件操作、u 盘文件直接加工,支持plc 程序、系统软件u 盘升级
自动上下料:
* 支持自定义8 个y 输出点
* 检测8 个x 输入点
可控制3 个进给轴(含c 轴)、1 个模拟主轴,1ms 高速插补,0.1μm 控制精度
系统技术参数:
可实现主轴连续定位、刚性攻丝、刚性螺纹加工
内置多plc 程序,当前运行的plc 程序可选择
支持语句式宏代码编程,支持带参数的宏程序调用
支持公制/ 英制编程,具有自动对刀、自动倒角、刀具寿命管理功能
支持中文、英文显示,由参数选择
具备usb 接口,支持u 盘文件操作、系统配置和软件升级
可控制1 路0v ~ 10v 模拟电压输出
1 路手轮输入,支持手持单元
可控制18 点通用输入/18 点通用输出
最小输入增量:0.001mm(0.0001inch)
最小指令增量:0.001mm(0.0001inch)
最大行程:±99999999× 最小指令增量
快速移动速度:最高60m/min
快速倍率:f0、25%、50%、100% 共四级实时修调
进给倍率:0 ~ 150% 共十六级实时修调
插补方式:直线插补、圆弧插补( 支持三点圆弧插补)、螺纹插补、刚性攻丝6yornew f006六轴机器人控制系统1套1)基于rc 总线的控制系统,控制器、驱动器等核心部件;
2)采用先进的 rc 控制系统;
3)通过内置服务信息系统(sis)监测自身运动和载荷情况并优化服务需求,持续工作时间更长;
4)嵌入式机器人控制器:基于 arm+dsp+fpga 硬件结构,可控制6-8 轴,运算速度达到 500mips,具有高速运动控制现场总线、以太网、rs232、rs485、can、ethercat 以及 devicenet 任一接口,可实现连续轨迹示教和在线示教,具备远程监控和诊断功能;
5)动力学自适应辨识控制技术:综合考虑机器人运动过程中重力、哥式力、离心力等外力干扰运用自适应控制技术提高机器人的动态性能。
6)外部控制输入:数字i/o板,标准输入/输出各32点,可扩展、支持2路模拟量输出;
7)应用:搬运、弧焊、涂胶、喷涂、码垛等;
8)保护功能:伺服防碰传感器、位置软限位、机械硬限位、焊枪机械防碰传感器;
9)异常检出功能:紧急停止异常、控制时序异常、伺服异常、码盘异常、示教异常、用户操作异常、电焊异常、弧焊异常、传感异常等;
10)诊断功能:按键诊断、信号诊断、报警诊断等;
11)原点复位:由码盘电池支持,不需要每次开机运行原点复位;
12)冷却系统:风冷
13)噪声:70<db
14)环境温度/湿度范围:0~40℃(无冻霜)/0~90%rh(无结霜)
15)电源:三相ac220v 50/60hz
16)接地:d类以上机器人专用接地7铝合金工作台1套带移动脚轮和脚杯
长宽高:1.8m*2m*1.2m
带透明亚克力护栏,抗拉强度:310mpa,伸长应力:260mpa,硬度:10hw
壁厚:2.0mm,表面:银白阳极氧化




- 联系人:吴经理(男)
- 手机: 13652923051
- QQ:3038718145